Meet us at the Paris Air Show
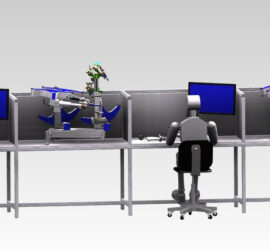
We will be demonstrating robotic grinding, shaping, and polishing at the 54th International Paris Air Show (SIAE) June 19-25th. Our local partner, Europe Technologies, will have our system along with other automated finishing solutions at their booth in Hall 2B, stand B66.